소모임 선택:
프로젝트 등록하기

Autoware




Autoware
Autoware
자율주행연구모임은 3학년 이상 인턴 학생들이 모여 자율주행, 딥러닝, 시스템가상화 등 자율주행자동차의 핵심 기술들을 연구하고 자율주행 소프트웨어를 개발하는 모임입니다. 개발 결과물은 연구용 차량에 탑재하여 실제 도로 주행 시험을 통해 검증하고 오픈 소스로 공개합니다. 운영체제, 로보틱스, 인공지능에 많은 관심을 갖는 학생들의 지원을 바랍니다.
담당교수: 김강희
소모임장: 효은
dlgydms412@gmail.com
dlgydms412@gmail.com
등록 인원: 6명
대표 진행 분야: 자율주행, 딥러닝, 시스템가상화
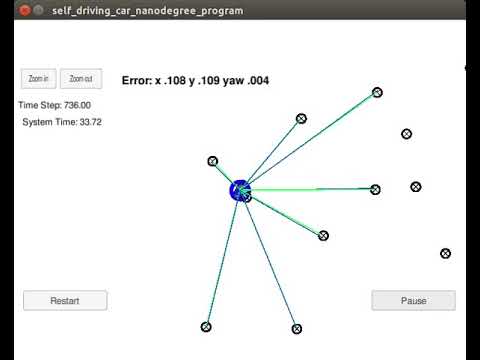
Particle Filter를 이용한 Localization
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. 자율주행 차량이 자차 위치를 추정하기 위한 Particle Filter 기반의 localization 프로그램을 자동차 시뮬레이터 상에서 C++ 로 구현하였습니다.
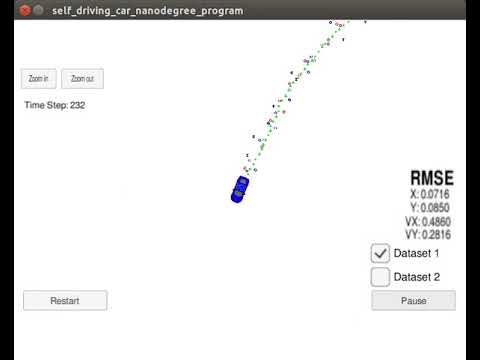
Unscented Kalman Filter
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. 이동 차량의 위치를 LiDAR와 Radar 센서를 함께 이용하여 추적하는 UKF 프로그램을 자동차 시뮬레이터 상에서 C++ 로 구현하였습니다.
숭실대학교 3차원 지도와 차량 주행 시뮬레이션
4개의 라이다를 장착한 자율주행차로 숭실대학교 캠퍼스를 주행하면서 얻어진 데이터로 3차원 지도를 제작하였습니다. 그리고 이 3차원 지도 안에서 데이터 수집 당시의 주행 과정을 재현(replay)하였습니다.
behavioral cloning
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, deep learning을 사용하여 인간의 운전 동작(steering)을 학습한 프로그램을 자동차 시뮬레이터 상에서 구현하였습니다. 자동차 시뮬레이터의 해상도가 낮아 동영상 품질이 좋지 않음을 양해해 주세요.
차량 검출
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, opencv, machine learning를 이용한 차량 검출 기술입니다.
차선 검출
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, opencv를 이용한 차선 검출 기술입니다.
프로젝트 정보
이름
Particle Filter를 이용한 Localization
작성자
김강희
참여자
김강희
프로젝트 소개
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. 자율주행 차량이 자차 위치를 추정하기 위한 Particle Filter 기반의 localization 프로그램을 자동차 시뮬레이터 상에서 C++ 로 구현하였습니다.
시작일
2018-06-29
프로젝트 소속
Autoware
프로젝트 정보
이름
Unscented Kalman Filter
작성자
김강희
참여자
김강희
프로젝트 소개
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. 이동 차량의 위치를 LiDAR와 Radar 센서를 함께 이용하여 추적하는 UKF 프로그램을 자동차 시뮬레이터 상에서 C++ 로 구현하였습니다.
시작일
2018-06-29
프로젝트 소속
Autoware
프로젝트 정보
이름
숭실대학교 3차원 지도와 차량 주행 시뮬레이션
작성자
김강희
참여자
황인호, 김강희
프로젝트 소개
4개의 라이다를 장착한 자율주행차로 숭실대학교 캠퍼스를 주행하면서 얻어진 데이터로 3차원 지도를 제작하였습니다. 그리고 이 3차원 지도 안에서 데이터 수집 당시의 주행 과정을 재현(replay)하였습니다.
시작일
2017-10-11
프로젝트 소속
Autoware
프로젝트 정보
이름
behavioral cloning
작성자
김강희
참여자
김강희
프로젝트 소개
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, deep learning을 사용하여 인간의 운전 동작(steering)을 학습한 프로그램을 자동차 시뮬레이터 상에서 구현하였습니다. 자동차 시뮬레이터의 해상도가 낮아 동영상 품질이 좋지 않음을 양해해 주세요.
시작일
2017-09-02
프로젝트 소속
Autoware
프로젝트 정보
이름
차량 검출
작성자
김강희
참여자
김강희
프로젝트 소개
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, opencv, machine learning를 이용한 차량 검출 기술입니다.
시작일
2017-09-02
프로젝트 소속
Autoware
프로젝트 정보
이름
차선 검출
작성자
김강희
참여자
김강희
프로젝트 소개
udacity.com 자율주행 교육 프로그램에서 요구하는 과제를 수행한 결과물입니다. python, opencv를 이용한 차선 검출 기술입니다.
시작일
2017-09-02
프로젝트 소속
Autoware
참여 요청자
김강희
처리중이오니 잠시만 기다려주십시오.